ロボットマニピュレータの運動学
(税込) 送料込み
商品の説明
ロボットマニピュレータの運動学
タイトル ロボットマニピュレータの運動学
監修 日本ロボット学会
著者 杉本浩一
シリーズ名 ロボット工学教科書シリーズ ; 第2巻
出版社 培風館
出版年月日等 1997.11
体裁 245p ; 22cm
注記 文献あり
注記 索引あり
ISBN 4563035726
価格
状態
・ 表紙に破れはないが,背表紙と裏表紙には擦れキズがある.
・ 本体の天部,小口部および地部はきれいです.
・書込みや線引き,読み跡はなく本文は美麗で新品同様です.
●発送:らくらくメルカリ便にて発送します
●自宅で保管中.
#ロボット #軍事用 #民生用ロボット #軍事用ロボット
#災害救助ロボット #ロボット産業 #ロボット言語 #ロボット手術
#運動の表現 #剛体の運動学 #開ループ機構の運動解析
#閉ループ機構の解析 #機構の特性解析 #Kinetics #Robot
#マニピュレータ #Robotics商品の情報
| カテゴリー | 本・音楽・ゲーム > 本 > コンピュータ/IT |
|---|---|
| 商品の状態 | 新品、未使用 |

ロボットマニピュレータの運動学 (ロボット工学教科書シリーズ) | 杉本
図解】運動学入門:順運動学と逆運動学について解説! | AGIRobots Blog
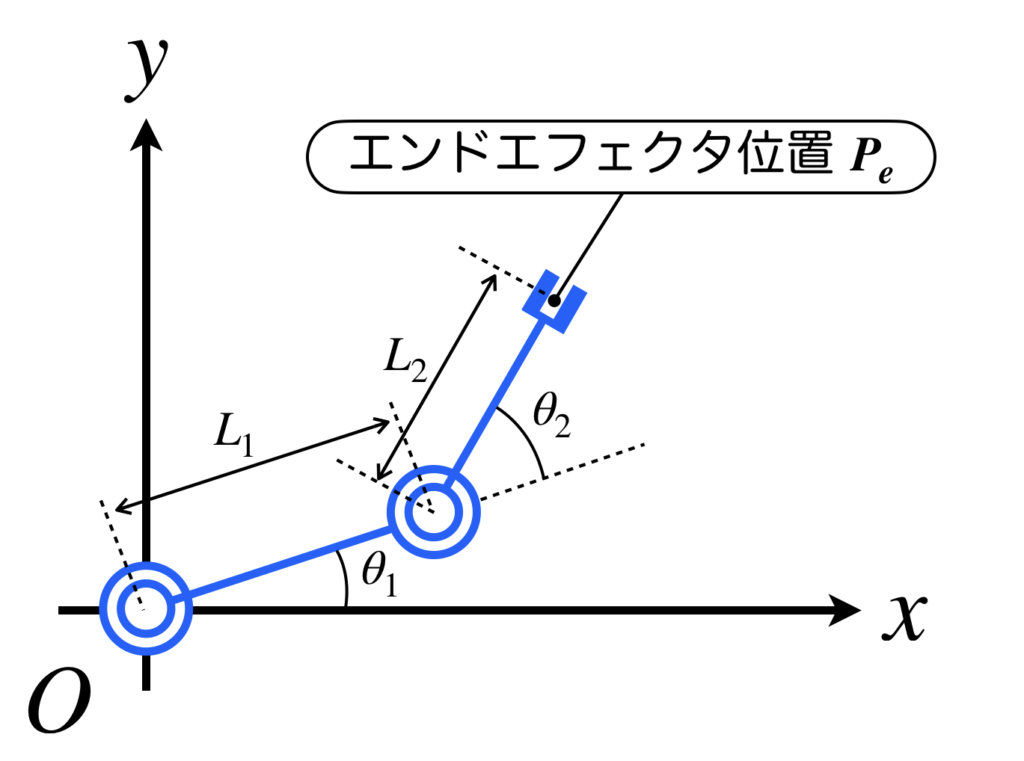
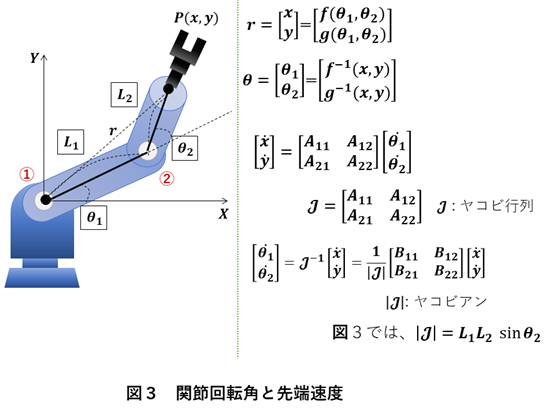
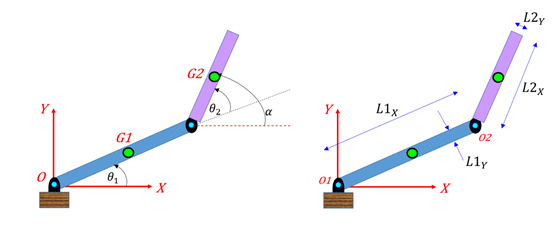
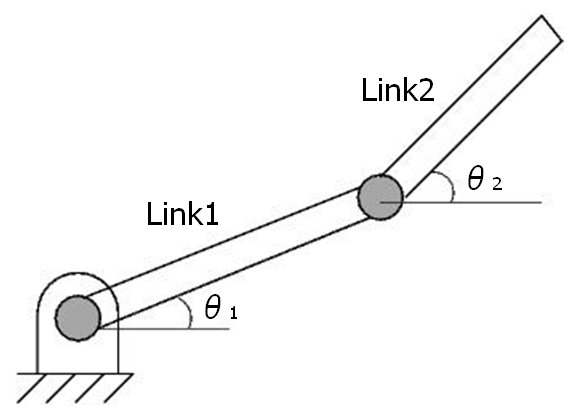
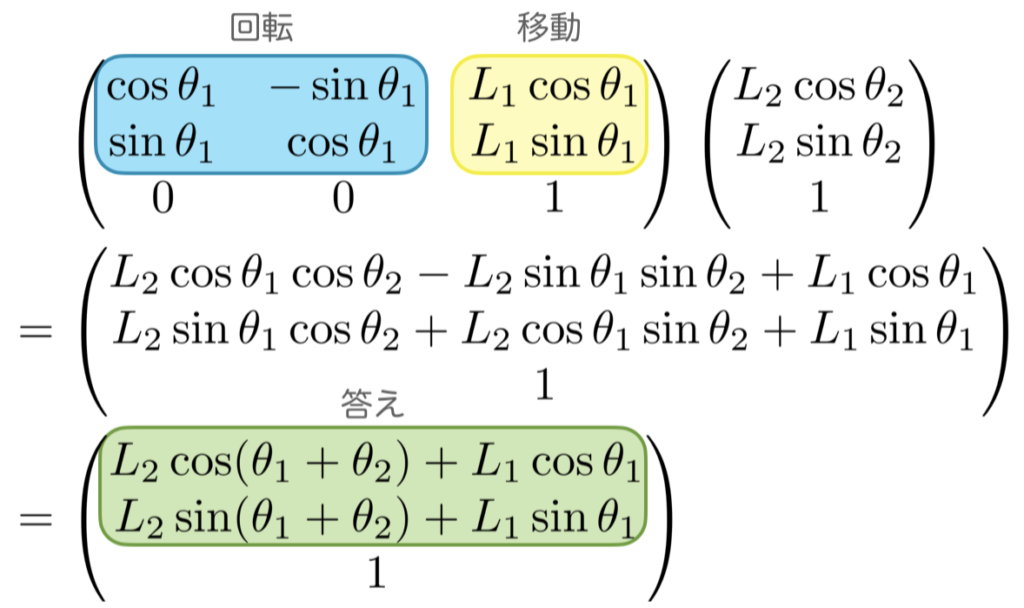
2リンクモデルの運動学を求めてみよう!簡単に順運動学の式を算出する
![Cで実装する「実践ロボット制御」[2] 〜2自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/06/795316b92fc766b0181f6fef074f03fa.png)
Cで実装する「実践ロボット制御」[2] 〜2自由度ロボットの順運動学と逆

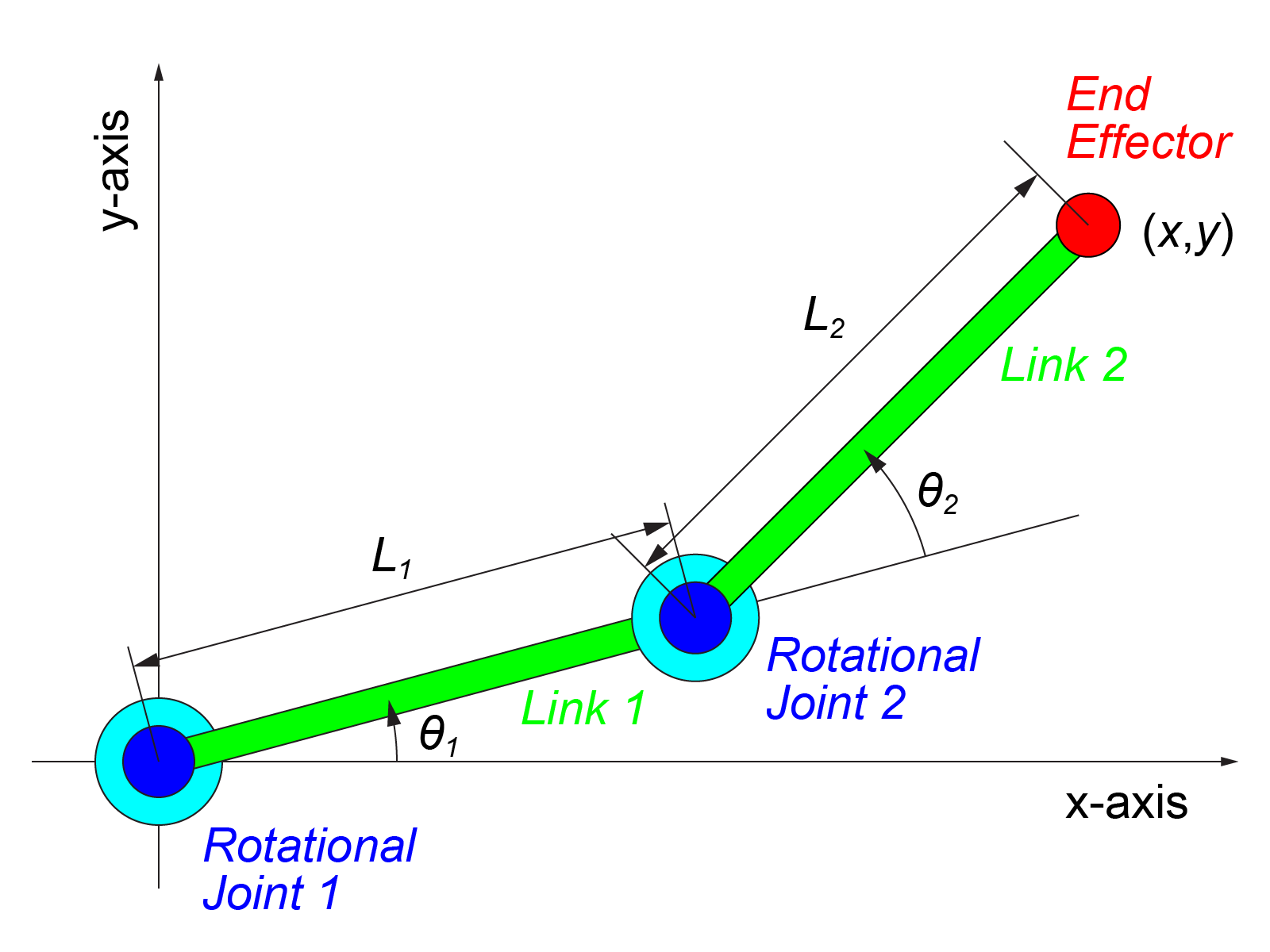
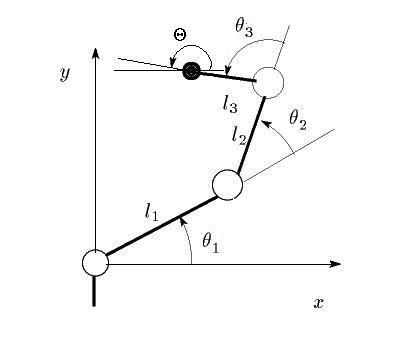
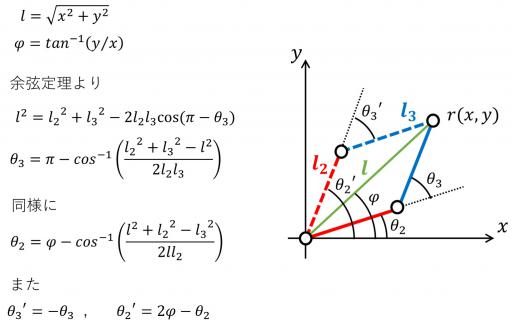
2リンクモデルの逆運動学を求める!順運動学の式から算出する方法
図解】運動学入門:順運動学と逆運動学について解説! | AGIRobots Blog
![Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/07/b1db37a1df6c6332fc8bdf704e9d1e49.png)
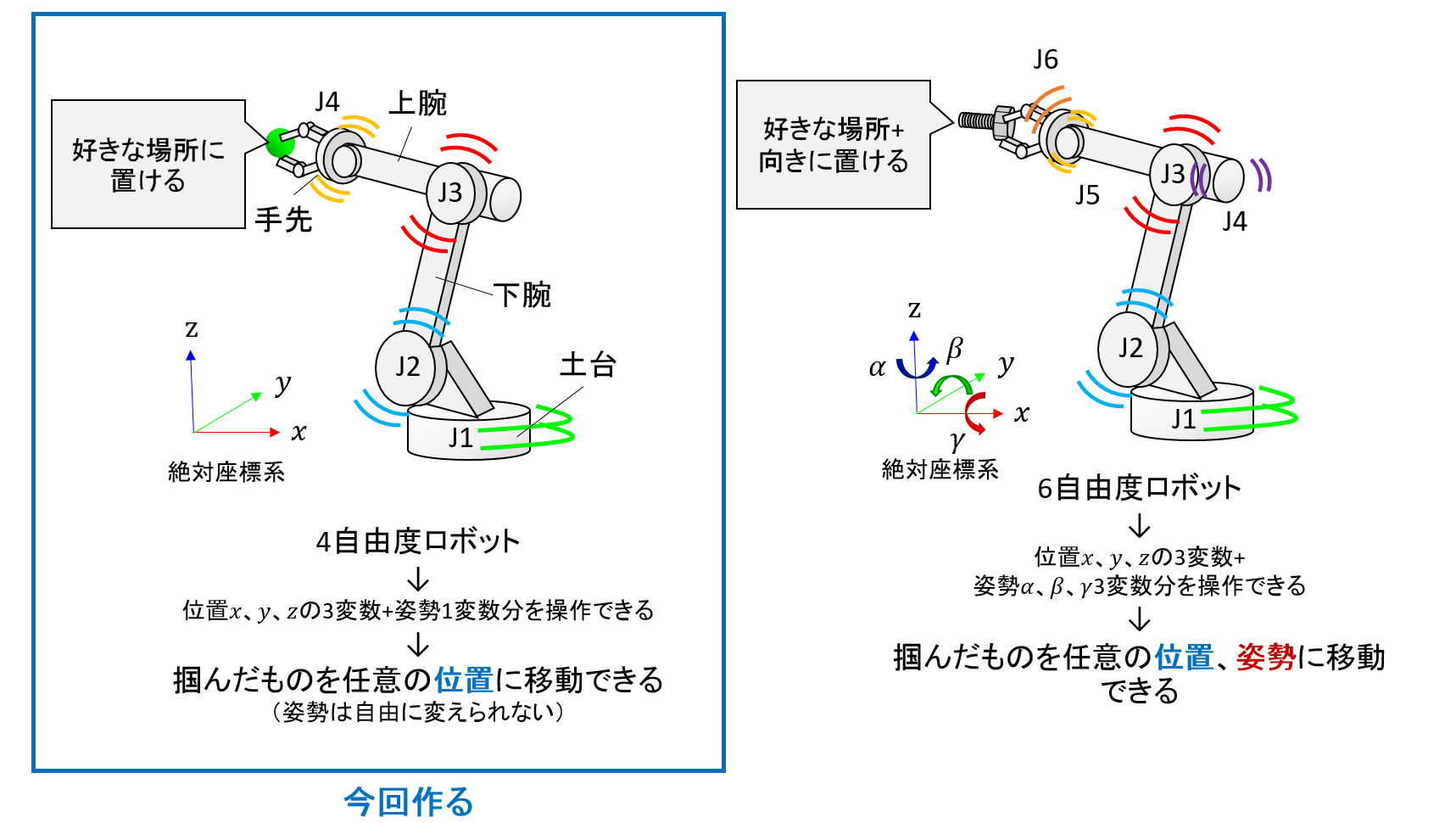
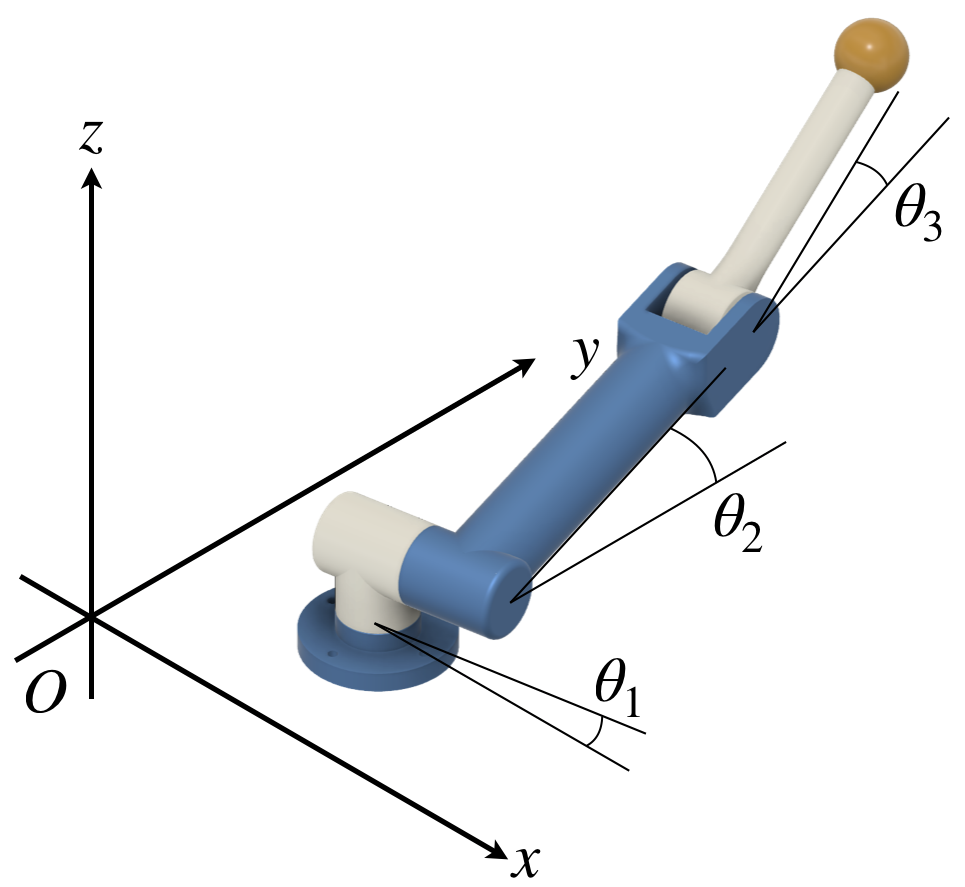
Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆

初めてのロボットアーム作りに挑戦!2: 2リンクの運動学とアーム製作
![Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/07/ad328257df3c27d0237be29c2f1fd87c.png)
Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆

逆運動学とは - MATLAB & Simulink
順運動学を使ったロボット描画① -製作するロボットの構造説明
マニピュレータ

図解】4脚ロボットの順運動学と逆運動学 | AGIRobots Blog
![Cで実装する「実践ロボット制御」[2] 〜2自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/06/f96d9b4281f6d16b3c7589aed5a17be5.png)
Cで実装する「実践ロボット制御」[2] 〜2自由度ロボットの順運動学と逆
仮想マニピュレータを用いた逆問題の解法
SIerによるロボット解説、安定動作の為の特異点回避方法 - 株式会社FA
ロボット工学
逆運動学の導出と 2 リンク ロボット アームへの適用 - MATLAB

ロボットアームの順運動学の原理(日本語) - YouTube
図解】運動学入門:順運動学と逆運動学について解説! | AGIRobots Blog
![Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/07/90b0dfa136419ccc91fda6fec27764ca.png)
Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆
知能ロボットシステム
逆運動学 | 三度の飯とエレクトロン
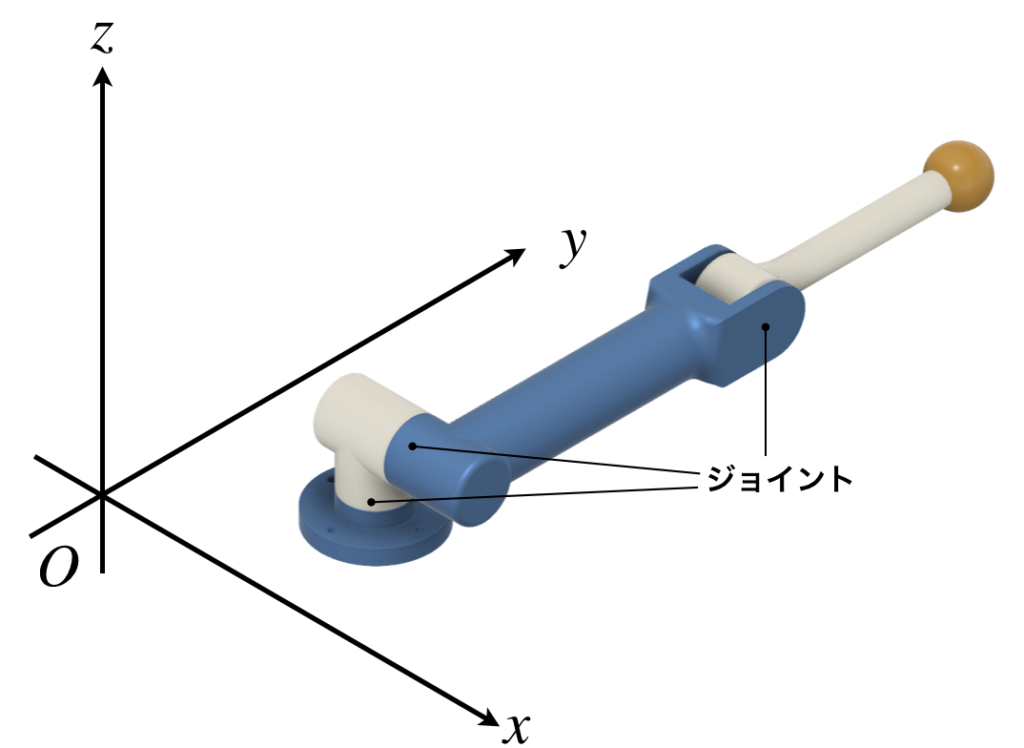
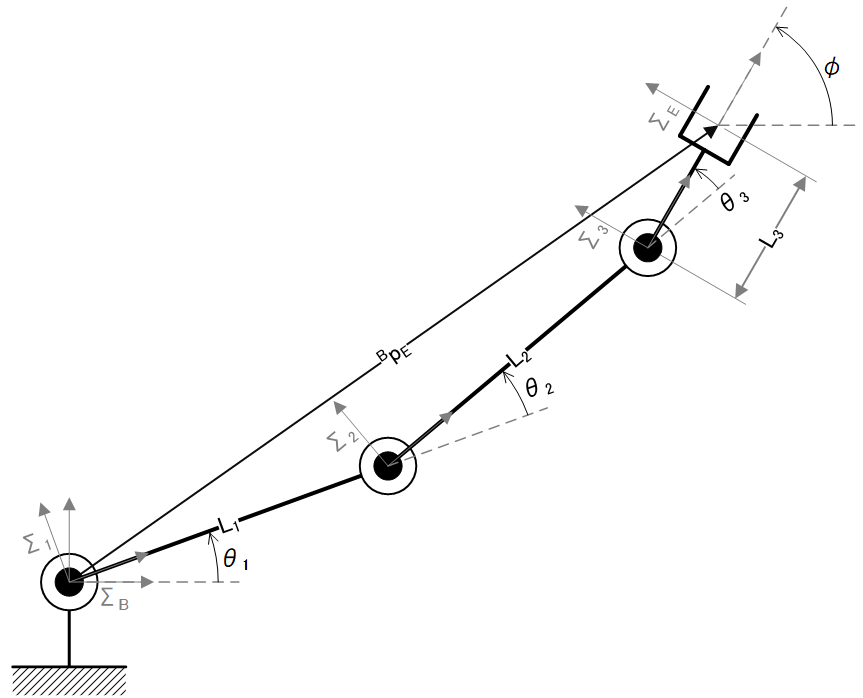
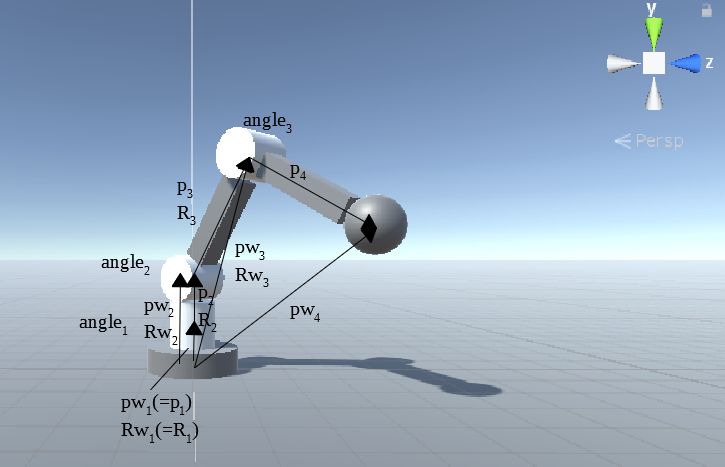
3自由度マニピュレータの作成(発展)

初めてのロボットアーム作りに挑戦!1: 1リンクの運動学 - detamamoru

ロボットマニピュレータの運動学 (ロボット工学教科書シリーズ) | 杉本
![Cで実装する「実践ロボット制御」[2] 〜2自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/06/3a4f695a458cb0ac0aceaa2eb13ac2dd.png)
Cで実装する「実践ロボット制御」[2] 〜2自由度ロボットの順運動学と逆
技術的小話【その2】ロボットアーム、逆運動学と冗長性 | ロボット
逆運動学
![Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/07/1249f2682be7181f6a6266c99ee5cae6.png)
Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆
図解】運動学入門:順運動学と逆運動学について解説! | AGIRobots Blog
Unityでロボットアームの逆運動学 - motoh's blog
![Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆](https://rt-net.jp/humanoid/wp-content/uploads/2020/07/571a82aa9fa95e9dd03f724dc3a94890.png)
Cで実装する「実践ロボット制御」[3] 〜3自由度ロボットの順運動学と逆

ROS講座 109 逆運動学を解く #ROS - Qiita

ロボットアームの順運動学:Matlabによる実装(日本語)
SIerによるロボット解説、安定動作の為の特異点回避方法 - 株式会社FA
6軸ロボットの逆運動学をsympyで解いてみよう | ニュース | TechMagic

Unityで学ぶ ロボットアームの逆運動学 (Japanese Edition) : 中村俊幸
2リンクマニピュレータの順運動学 | 西住工房(改)

初めてのロボットアーム作りに挑戦!3: 3リンクの運動学とアーム製作








商品の情報
メルカリ安心への取り組み
お金は事務局に支払われ、評価後に振り込まれます
出品者
スピード発送
この出品者は平均24時間以内に発送しています














